Note
Go to the end to download the full example code.
Poisson Equation with Local Refinement#
One of key features of mfv2d is the ability to locally refine the mesh with
both hierarchical refinement (divide elements) or with polynomial refinement
(increase order of elements).
This examples is otherwise identical to Poisson Equation in the Direct Formulation, where the direct Poisson is solved in a straight-forward manner. As such, only text and comments added to the code are pertaining to features not used in that one.
import numpy as np
import numpy.typing as npt
import pyvista as pv
import rmsh
from matplotlib import pyplot as plt
from matplotlib.collections import PolyCollection
from mfv2d import (
BoundaryCondition2DSteady,
KFormSystem,
KFormUnknown,
Mesh,
SolverSettings,
SystemSettings,
UnknownFormOrder,
mesh_create,
solve_system_2d,
)
def u_exact(x: npt.NDArray[np.float64], y: npt.NDArray[np.float64]):
"""Exact solution."""
return 2 * np.cos(np.pi / 2 * x) * np.cos(np.pi / 2 * y) + 5
def q_exact(x: npt.NDArray[np.float64], y: npt.NDArray[np.float64]):
"""Exact curl of solution."""
return np.stack(
(
-np.pi * np.cos(np.pi / 2 * x) * np.sin(np.pi / 2 * y),
np.pi * np.sin(np.pi / 2 * x) * np.cos(np.pi / 2 * y),
),
axis=-1,
)
def source_exact(x: npt.NDArray[np.floating], y: npt.NDArray[np.floating]):
"""Exact heat flux divergence."""
return -(np.pi**2) * np.cos(np.pi / 2 * x) * np.cos(np.pi / 2 * y)
q = KFormUnknown("q", UnknownFormOrder.FORM_ORDER_1)
p = q.weight
u = KFormUnknown("u", UnknownFormOrder.FORM_ORDER_0)
v = u.weight
system = KFormSystem(
v.derivative * u.derivative == -(v * source_exact) + (v ^ q_exact),
p * u.derivative - p * q == 0,
sorting=lambda f: f.order,
)
print(system)
N = 6
n1 = N
n2 = N
m, rx, ry = rmsh.create_elliptical_mesh(
rmsh.MeshBlock(
None,
rmsh.BoundaryCurve.from_knots(
n1, (-1, -1), (-0.5, -1.1), (+0.5, -0.6), (+1, -1)
), # bottom
rmsh.BoundaryCurve.from_knots(
n2, (+1, -1), (+1.5, -0.7), (+1, 0.0), (+1, +1)
), # right
rmsh.BoundaryCurve.from_knots(
n1, (+1, +1), (0.5, 0.5), (-0.5, 0.5), (-1, +1)
), # top
rmsh.BoundaryCurve.from_knots(
n2, (-1, +1), (-0.5, 0.33), (-1, -0.5), (-1, -1)
), # left
)
)
assert rx < 1e-6 and ry < 1e-6
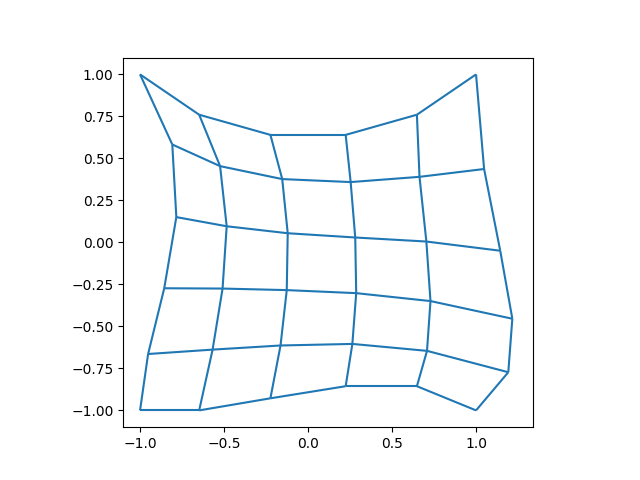
# Show the mesh for the first time.
fig, ax = plt.subplots(1, 1)
xlim, ylim = m.plot(ax)
ax.set_xlim(1.1 * xlim[0], 1.1 * xlim[1])
ax.set_ylim(1.1 * ylim[0], 1.1 * ylim[1])
ax.set_aspect("equal")
plt.show()
pval = 1 # Test polynomial order
mesh = mesh_create(pval, np.stack((m.pos_x, m.pos_y), axis=-1), m.lines + 1, m.surfaces)
[u(0*)]^T ([(E(1, 0))^T @ M(0) @ E(1, 0) | 0] [u(0)] [-1 * <u, source_exact> + <u, q_exact>])
[q(1*)] ([ M(1) @ E(1, 0) | -1 * M(1)] [q(1)] = [ 0])
Refinement Settings#
Refinement can be done in two ways - pre-solver refinement and post-solver refinement. For pre-solver refinement, the choice of which elements are hierarchically refined is based soley on geometrical and topological data. This is quite clearly because no solution has been computed yet.
Pre-solver refinement is facilitated by methods
mfv2d._mfv2d.Mesh.split_depth_first() and
mfv2d._mfv2d.Mesh.split_breath_first(). Both accept a predicate function they
evaluate for each element that could be refined, until a desired depth of refinement
is reached, or all leaf elements have been checked already. The difference between the
two is the order in which they examine leaves. Post-solver refinement is more involved,
so it won’t me discussed here in more detail.
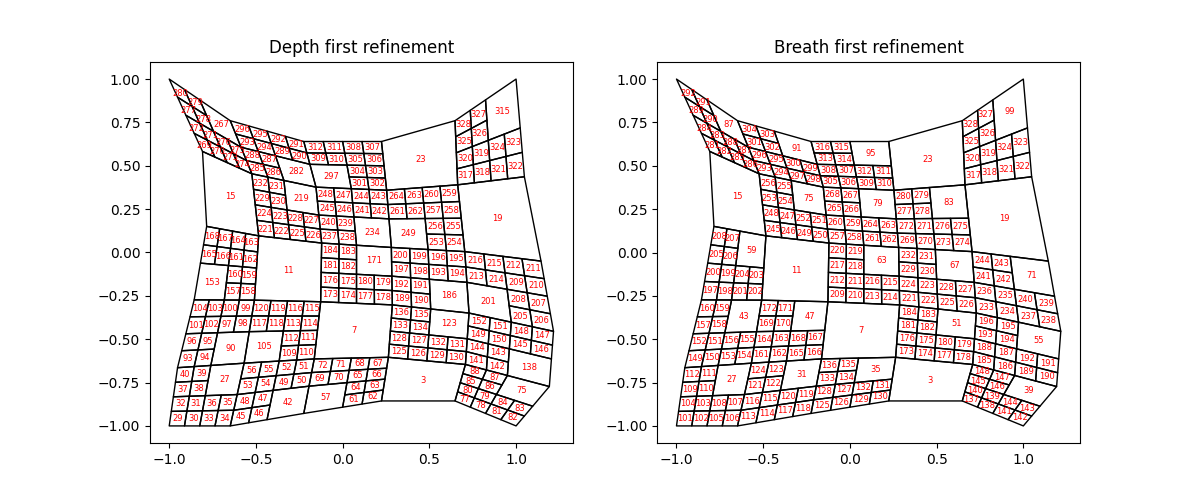
The example bellow shows how the refinement will differ if first 3 out of 4 elements
that are checked are refined. Note that this is just for illustrative purposes and
that in a more realistic case for pre-solver refinement, geometry of each element
could be checked through the mfv2d._mfv2d.Mesh.get_leaf_corners().
def division_predicate(m: Mesh, ie: int, counter: list[int]):
"""Test division predicate."""
counter[0] += 1
cnt = counter[0]
if (cnt & 3) != 0:
orders = m.get_leaf_orders(ie)
return orders, orders, orders, orders
return None
counter = [0]
depth_mesh = mesh.split_depth_first(2, division_predicate, counter)
# Reset the counter
counter = [0]
breath_mesh = mesh.split_breath_first(2, division_predicate, counter)
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(12, 5))
vertices_depth = [
depth_mesh.get_leaf_corners(idx) for idx in depth_mesh.get_leaf_indices()
]
ax1.add_collection(
PolyCollection(
vertices_depth,
facecolors="none",
antialiased=True,
)
)
for idx, quad in zip(depth_mesh.get_leaf_indices(), vertices_depth):
ax1.text(
*np.mean(quad, axis=0),
str(idx),
ha="center",
va="center",
color="red",
fontsize=6,
)
ax1.autoscale()
ax1.set(aspect="equal", title="Depth first refinement")
vertices_breath = [
breath_mesh.get_leaf_corners(idx) for idx in breath_mesh.get_leaf_indices()
]
ax2.add_collection(
PolyCollection(
vertices_breath,
facecolors="none",
antialiased=True,
)
)
for idx, quad in zip(breath_mesh.get_leaf_indices(), vertices_breath):
ax2.text(
*np.mean(quad, axis=0),
str(idx),
ha="center",
va="center",
color="red",
fontsize=6,
)
ax2.autoscale()
ax2.set(aspect="equal", title="Breath first refinement")
plt.show()
solution, stats, depth_mesh = solve_system_2d(
depth_mesh,
system_settings=SystemSettings(
system,
boundary_conditions=[
BoundaryCondition2DSteady(u, depth_mesh.boundary_indices, u_exact)
],
),
solver_settings=SolverSettings(absolute_tolerance=1e-10, relative_tolerance=0),
print_residual=False,
recon_order=25,
)
sol: pv.UnstructuredGrid = solution[-1]
pv.set_plot_theme("document")
plotter = pv.Plotter(shape=(1, 3), window_size=(1600, 800), off_screen=True)
edges = sol.extract_all_edges()
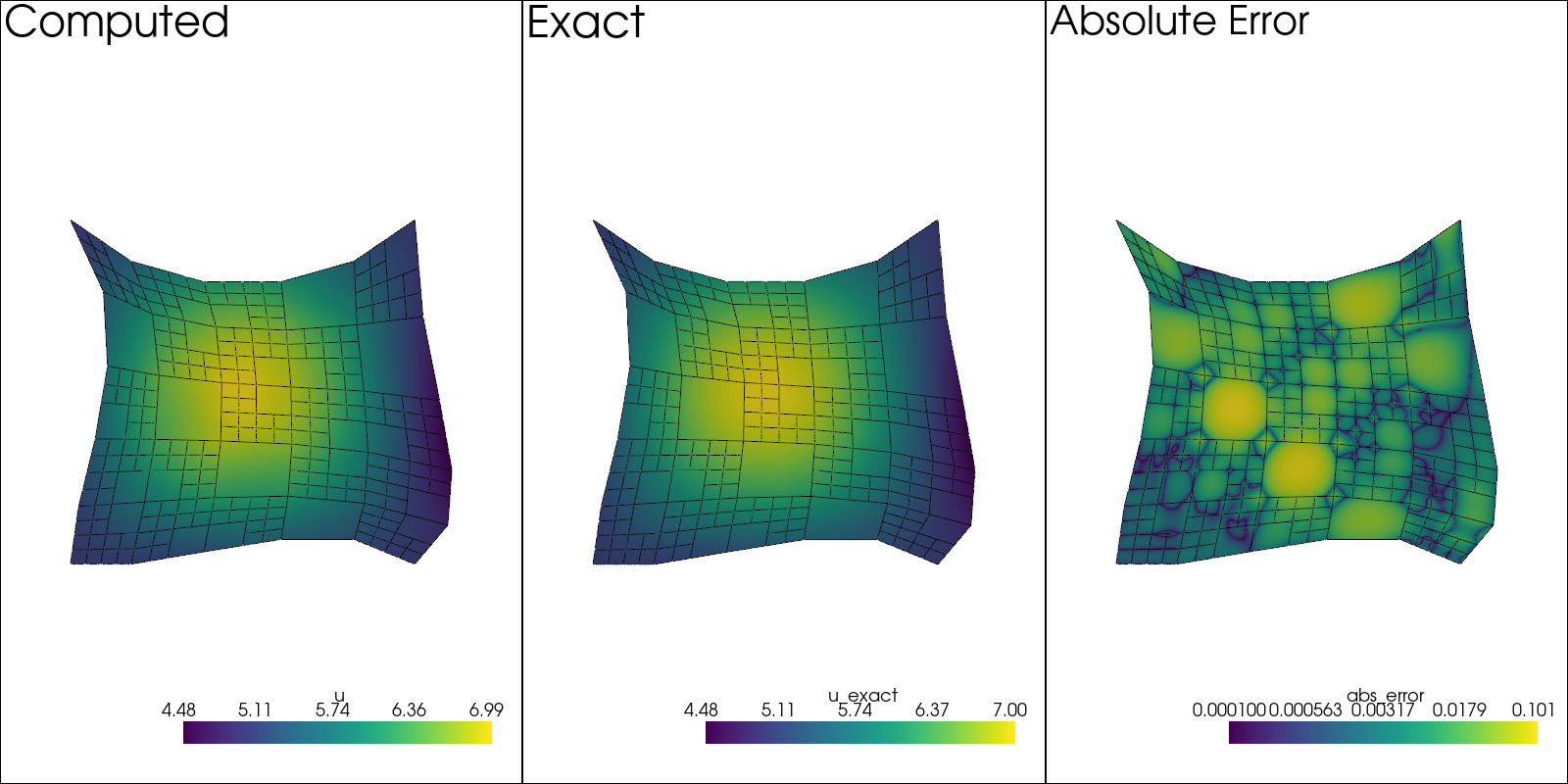
plotter.subplot(0, 0)
plotter.add_mesh(sol.copy(), scalars=u.label, show_scalar_bar=True)
plotter.add_mesh(edges, color="black")
plotter.add_text("Computed")
plotter.view_xy()
sol.point_data["u_exact"] = u_exact(sol.points[:, 0], sol.points[:, 1])
plotter.subplot(0, 1)
plotter.add_mesh(sol.copy(), scalars="u_exact", show_scalar_bar=True)
plotter.add_mesh(edges, color="black")
plotter.add_text("Exact")
plotter.view_xy()
# Error at strong BCs is ~10^{-30}, so make sure to add this
# value, otherwise it will ruin the colormap scale.
sol.point_data["abs_error"] = (
np.abs(sol.point_data["u_exact"] - sol.point_data[u.label]) + 1e-4
)
plotter.subplot(0, 2)
plotter.add_mesh(sol.copy(), scalars="abs_error", show_scalar_bar=True, log_scale=True)
plotter.add_mesh(edges, color="black")
plotter.add_text("Absolute Error")
plotter.view_xy()
#
# Computing the Results
# ---------------------
#
# Just as was done for the un-refined result, here :math:`L^2` and :math:`H^1` errors
# are computed.
#
p_vals = np.arange(1, 7)
h1_err = np.zeros(p_vals.size)
l2_err = np.zeros(p_vals.size)
for ip, pval in enumerate(p_vals):
base_mesh = mesh_create(
pval, np.stack((m.pos_x, m.pos_y), axis=-1), m.lines + 1, m.surfaces
)
def refine_test(m: Mesh, i: int):
"""Check if element should be refined."""
corners = m.get_leaf_corners(i)
if np.any(np.linalg.norm(corners, axis=-1) > 0.5):
order = m.get_leaf_orders(i)
return order, order, order, order
# Do not refine
return None
mesh = base_mesh.split_depth_first(2, refine_test)
solution, stats, mesh = solve_system_2d(
mesh,
system_settings=SystemSettings(
system,
boundary_conditions=[
BoundaryCondition2DSteady(u, mesh.boundary_indices, u_exact)
],
),
solver_settings=SolverSettings(absolute_tolerance=1e-10, relative_tolerance=0),
print_residual=False,
recon_order=25,
)
sol = solution[-1]
sol.point_data["u_err2"] = (
sol.point_data["u"] - u_exact(sol.points[:, 0], sol.points[:, 1])
) ** 2
sol.point_data["q_err2"] = np.linalg.norm(
sol.point_data["q"] - q_exact(sol.points[:, 0], sol.points[:, 1]), axis=-1
)
total_error = sol.integrate_data()
h1_err[ip] = total_error.point_data["q_err2"][0]
l2_err[ip] = np.sqrt(total_error.point_data["u_err2"][0])
print(f"Finished {pval=:d}")
Finished pval=1
Finished pval=2
Finished pval=3
Finished pval=4
Finished pval=5
Finished pval=6
Results in \(H^1\) Norm#
k1, k0 = np.polyfit((p_vals), np.log(h1_err), 1)
k1, k0 = np.exp(k1), np.exp(k0)
print(f"Solution converges with p as: {k0:.3g} * ({k1:.3g}) ** p in H1")
plt.figure()
plt.scatter(p_vals, h1_err)
plt.semilogy(
p_vals,
k0 * k1**p_vals,
label=f"${k0:.3g} \\cdot \\left( {{{k1:+.3g}}}^p \\right)$",
linestyle="dashed",
)
plt.gca().set(
xlabel="$p$",
ylabel="$\\left|\\left| \\nabla \\ times u - \\nabla \\times \\bar{u}"
" \\right|\\right|$",
yscale="log",
)
plt.legend()
plt.grid()
plt.show()
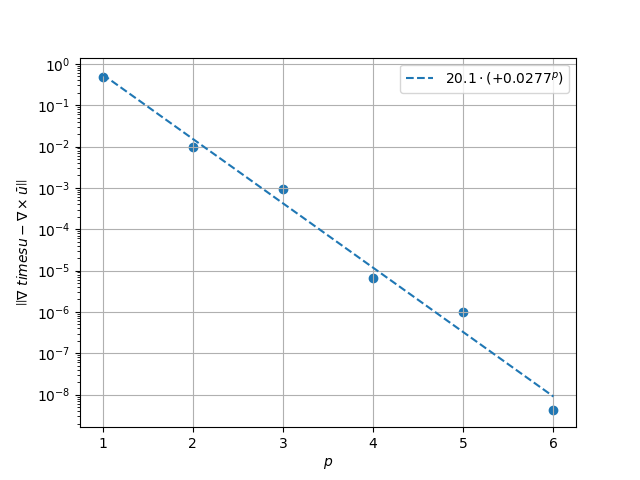
Solution converges with p as: 20.1 * (0.0277) ** p in H1
Results in \(L^2\) Norm#
k1, k0 = np.polyfit((p_vals), np.log(l2_err), 1)
k1, k0 = np.exp(k1), np.exp(k0)
print(f"Solution converges with p as: {k0:.3g} * ({k1:.3g}) ** p in L2")
plt.figure()
plt.scatter(p_vals, l2_err)
plt.semilogy(
p_vals,
k0 * k1**p_vals,
label=f"${k0:.3g} \\cdot \\left( {{{k1:+.3g}}}^p \\right)$",
linestyle="dashed",
)
plt.gca().set(
xlabel="$p$",
ylabel="$\\left|\\left| u - \\bar{u} \\right|\\right|$",
yscale="log",
)
plt.legend()
plt.grid()
plt.show()
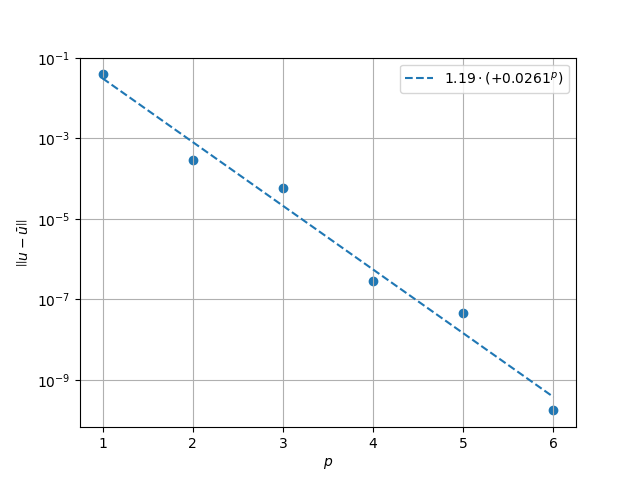
Solution converges with p as: 1.19 * (0.0261) ** p in L2
Total running time of the script: (0 minutes 12.568 seconds)